


明电舍—–无人搬运车MCAT及其组件
随着科技的发展,人力成本的上升,制造业对生产自动化、物流自动化需求火急,“机器人换人”的脚步越发加快。AGV小车具有适应性好、柔性程度高、可靠性好等特征,广泛应用于各个行业中。
今天给大家来介绍的是来自明电舍的无人搬运车MCAT及其组件的介绍。

MCAT特点
无人搬运车其主要部件(MCAT)的设计理念如下:
(1)无论在何处,谁都可以使用的简易AGV系统
① 基本操作10分钟学会
(2) 可根据客户要求进行改装
① 开放式的外部输入(PLC通用接口)
② 从简单操作到复杂程序,另外可提供非常丰富的选配部件。
(3) 可适用于生产流水线
① 可以微速驱动行驶,代替传统式传带式生产线
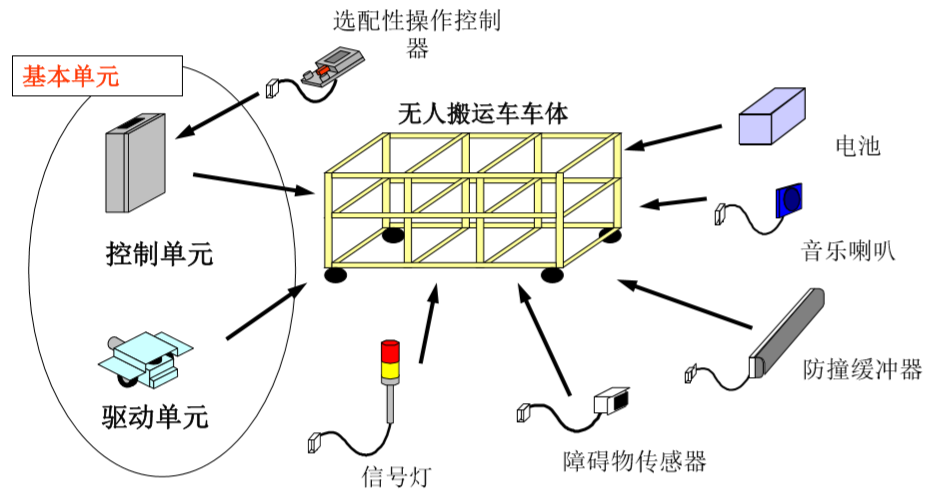
由于明电舍标准型无人搬运车MCAT是由驱动单元、控制单元等配套元件组成,所以根据客户要求在产品大小,功能方面都可以改变。

根据驱动单元搬运重量和搬运速度,分为3种车型。
「基本驱动方式」
[两轮差速控制式]
改变左右的驱动电动机回转数的控制方式,来改变行驶方向。
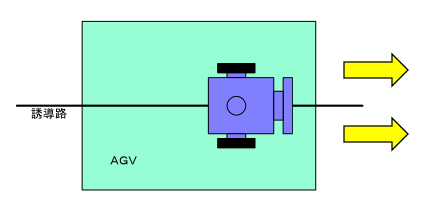
直线行驶时,左右的电动机速度相同。
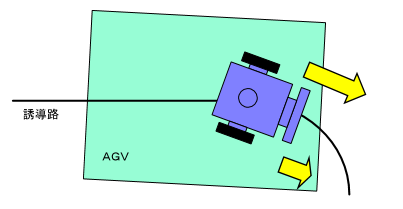
弯道行驶时,采用降低内圈轮电动机速度 的方式。
采用此种驱动方式的优点:无论是直行还是弯道都不会碾压感应磁条,以延长感应磁条的使用寿命。
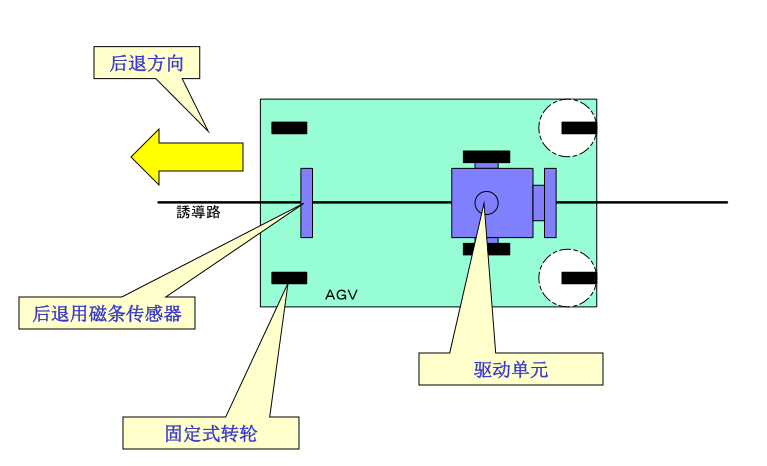
「简易后进型驱动方式」
针对与经常使用前进式的顾客,在偶尔情况下使用后退功能时,可以安装简易的后退装置。
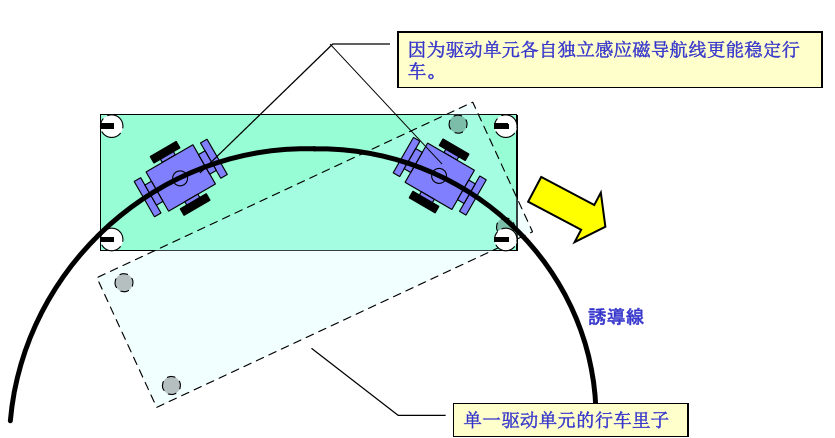
「重量物・长尺寸物搬运的驱动方式」
采用2个驱动单元、对控制单元作特殊化处理。

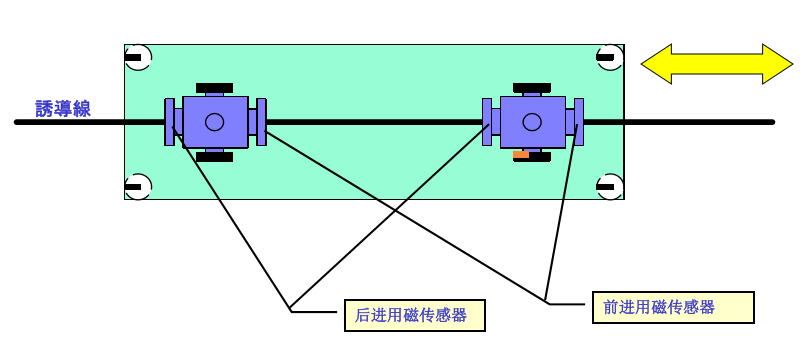
「前后进的驱动方式」
由于采用2个驱动单元,每个驱动单元后磁条传感器的追加,控制单元的特殊化,可以使搬运车做到完美的前后进。
控制单元的特点
①便于移载器的控制,地面上设备的控制等,我们为客户提供了标准的输入输出
端子,客户可以根据需要自行设定。
②为控制单元的CPU、驱动板以及I/O板等提供了稳定的电源。
③提供了外部电源,从标准配置电池到选配型800mA电池。
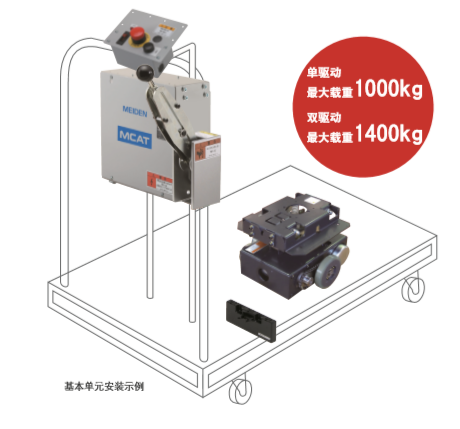
基本组装
只需将基本单元与适合用途的选配件安装到现有的台车上, 客户即可制作自己的AGV。

根据搬运物的重量或行驶速度选 择最适合的驱动单元。
使用事例
①组装部件搬运台车

用于将部件搬运到组装生产线。
②手动托盘台车

连同手动托盘一起牵引搬运堆装有产品包装箱的 托盘。
③产品手推车牵引台车
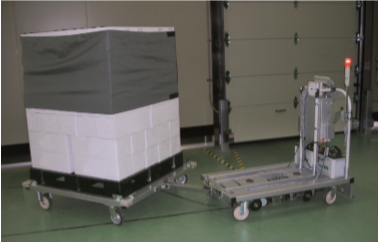
MCAT牵引的产品手推车包括箱型托盘与平面托盘 2种类型。利用连接销与托盘台车连接后,自动搬 运到保管仓库。
④潜入式牵引台车
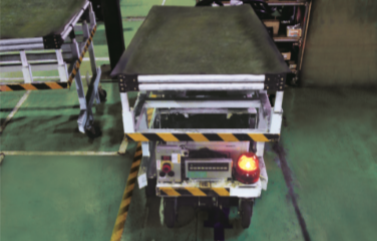
该MCAT用作潜入式牵引台车。通过将车高控制在较 低的水平上,可潜入台车的下面,并从下面伸出牵 引销,挂在台车框架上进行牵引搬运。到达站点之 后,自动降低牵引销,留下台车,MCAT则去执行下 一趟搬运。
⑤机械部件搬运台车

该MCAT用于向机械部件加工生产线投放原 料并回收空托盘。从升降机中接收装有材 料的托盘,然后自动供给到加工生产线的 传送带上。另外,自动从加工生产线接收 空托盘并自动搬到升降机中。
⑥物流中心手推车牵引台车

将物流中心入货的手推式台车分类搬运到出货场。自 动读取手推式台车上的商品条码,自动判别手推式台 车的目的地,然后牵引搬运到目的地。手推式台车的 连接由作业人员手动进行,分离为自动进行。
